
Page 6 - Antrieb
P. 6
6. Steuerung
S1 – an und S2 aus – halt was heißt das? Wir müssen hier in die Digitaltechnik:
Die PIN1 bis PIN4 werden mit GND und 5VDC angesteuert. Das ist die typische Digitalspannung.
Nun zum Übersetzen – 5VDC entspricht Schalter zu ---- GND entspricht Schalter auf. Das ist das
Grundprinzip.
Nun muss man noch einen Gedanken in die Binärtechnik gehen – ein Teilgebiet der
Digitaltechnik.
Hier gilt für uns 5VDC = High oder 1 und GND = Low oder 0. Also ich stelle das mal in einer
Tabelle gegenüber:
1 Logik
Schalter zu 5VDC High 1
Schalter auf GND Low 0
Der Arduino bringt in seinen Ausgängen (OUTPUT) immer GND (0V) – bei LOW (im Programm)
und 5VDC – bei High (im Programm).
pinMode(12, OUTPUT); //lege PIN12 als Ausgang fest
digitalWrite(12, HIGH); //Schreibe an den Ausgang 12 (OUTPUT) ein HIGH
Somit wird der PIN12 des Arduino HIGH – also 5VDC.
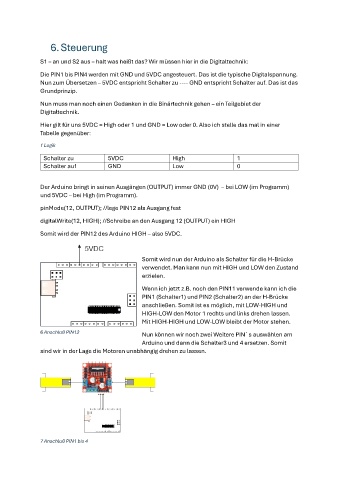
Somit wird nun der Arduino als Schalter für die H-Brücke
verwendet. Man kann nun mit HIGH und LOW den Zustand
erzielen.
Wenn ich jetzt z.B. noch den PIN11 verwende kann ich die
PIN1 (Schalter1) und PIN2 (Schalter2) an der H-Brücke
anschließen. Somit ist es möglich, mit LOW-HIGH und
HIGH-LOW den Motor 1 rechts und links drehen lassen.
Mit HIGH-HIGH und LOW-LOW bleibt der Motor stehen.
6 Anschluß PIN12 Nun können wir noch zwei Weitere PIN`s auswählen am
Arduino und dann die Schalter3 und 4 ersetzen. Somit
sind wir in der Lage die Motoren unabhängig drehen zu lassen.
7 Anschluß PIN1 bis 4